Remote Robot
Entrepreneurship / Arduino / Telecommunication
Team Work (Team Leader)
Beijing
June. 2016 - May. 2017

This is an innovation and entrepreneurship projects. I worked as the team leader and completed overall planning, division of labour, and monitored the progress. Conducted researches in terms of markets, users, competitive products . Completed interactive design in terms of app function, app interface, LOGO, and robot appearance. Be responsible of operation promotion in terms of souvenir and materials production, offline promotion. This project was funded and appreciated widely.
DESCRIPTION
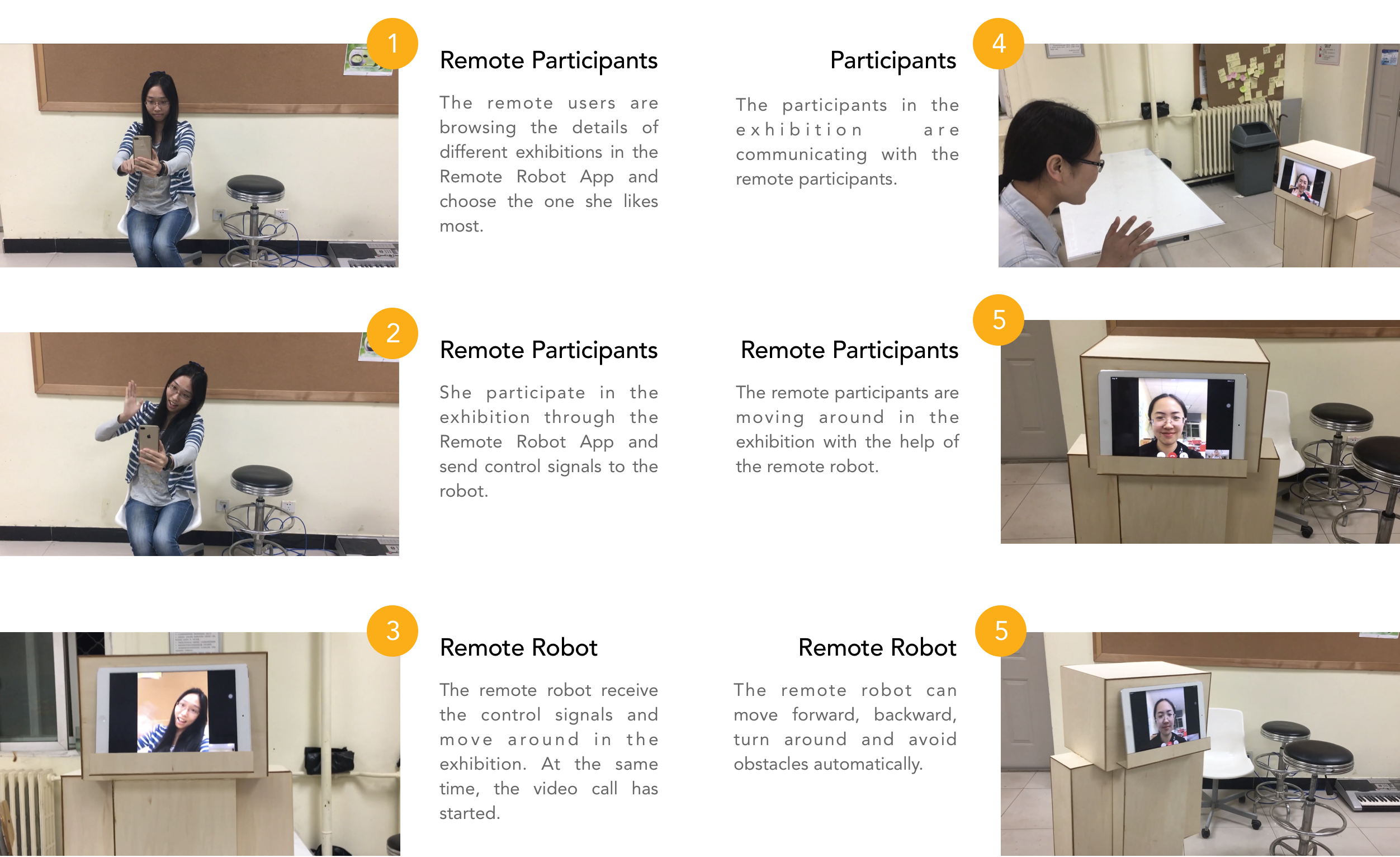
The project aims to design and produce a remote robot. This robot can take place of an exhibitor who can’t show up for an exhibition for physical or other reasons. Users can remotely control the movements of the robot and communicate with the staff at the exhibition using the mobile APP we designed on real-time video calls to gain more information on the exhibition.
INSPIRATION
“In The Big Bang Theory, Sheldon used a robot to take the place of himself to be with his friends. We think this is a cool idea, and can have many applications in other aspects of life, so we decided to design and make a remote robot.”

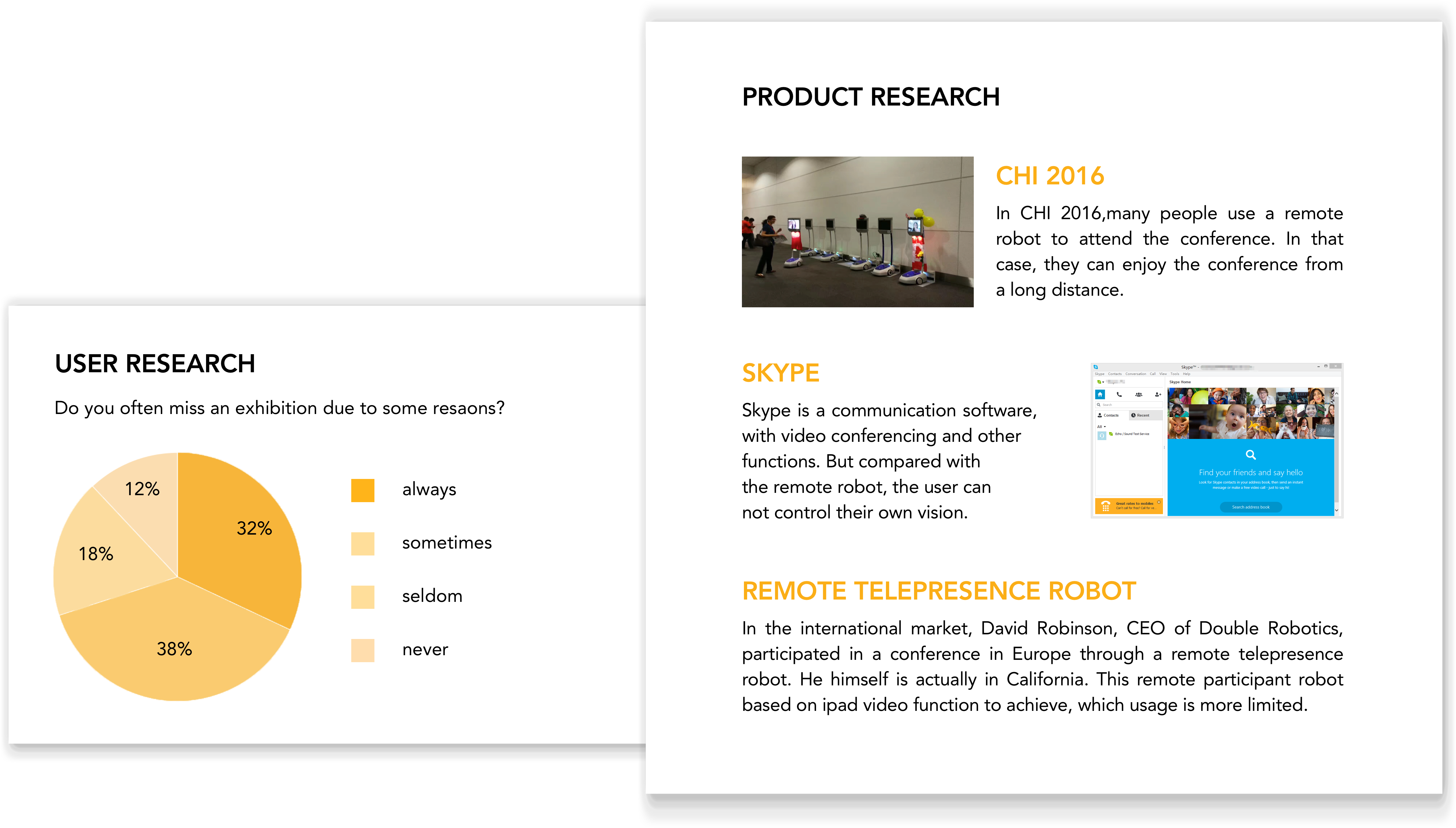
RESEARCH WORKS
In the begining, I conduct some research works, including product research and use research. Through the research works, I find out that people often miss an exhibition due to some reasons. However, there is not a good way to solve this problem. We can learn from the remote robot used in CHI 2016 and make our own remote robot.
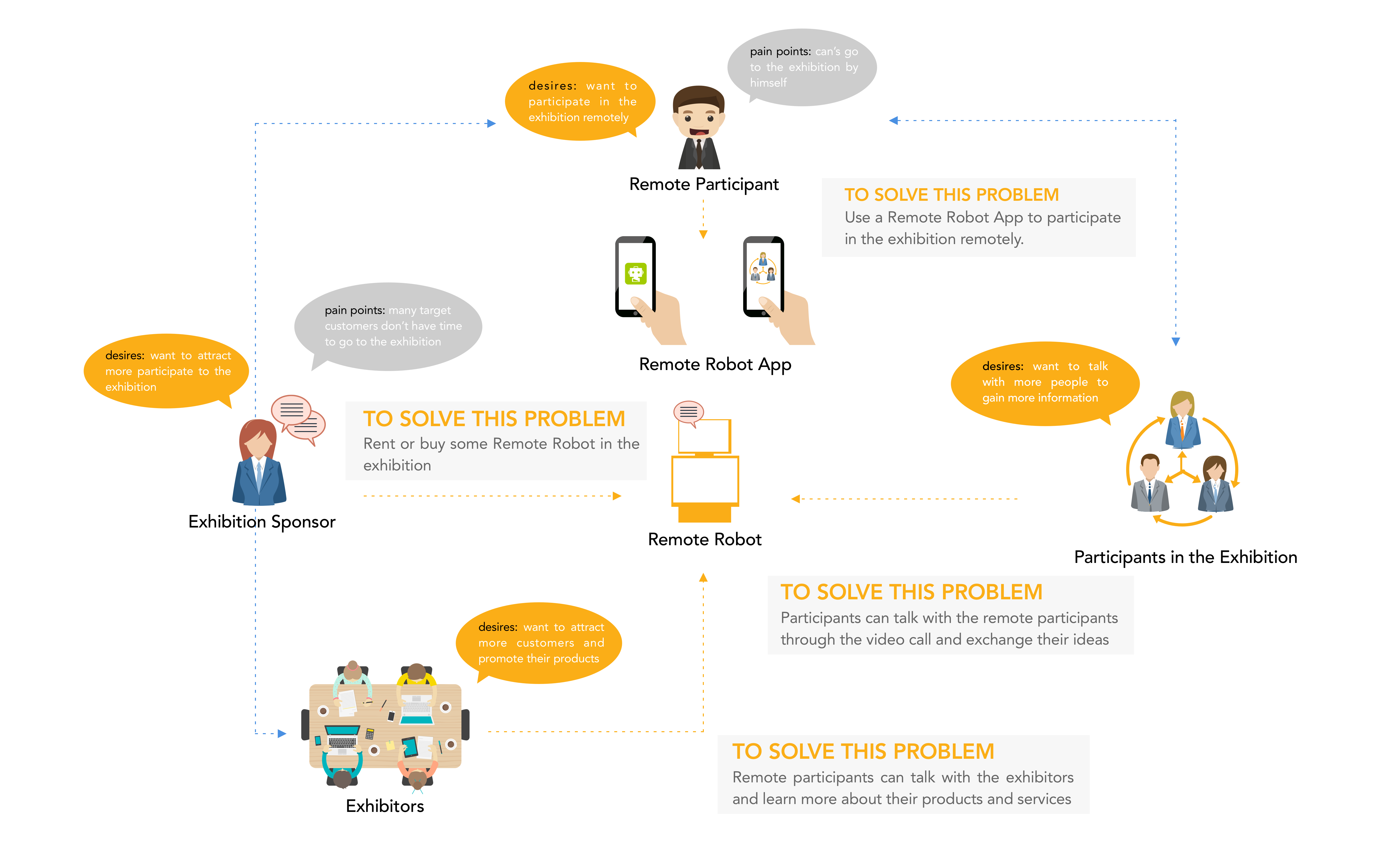
CONTENT MAP
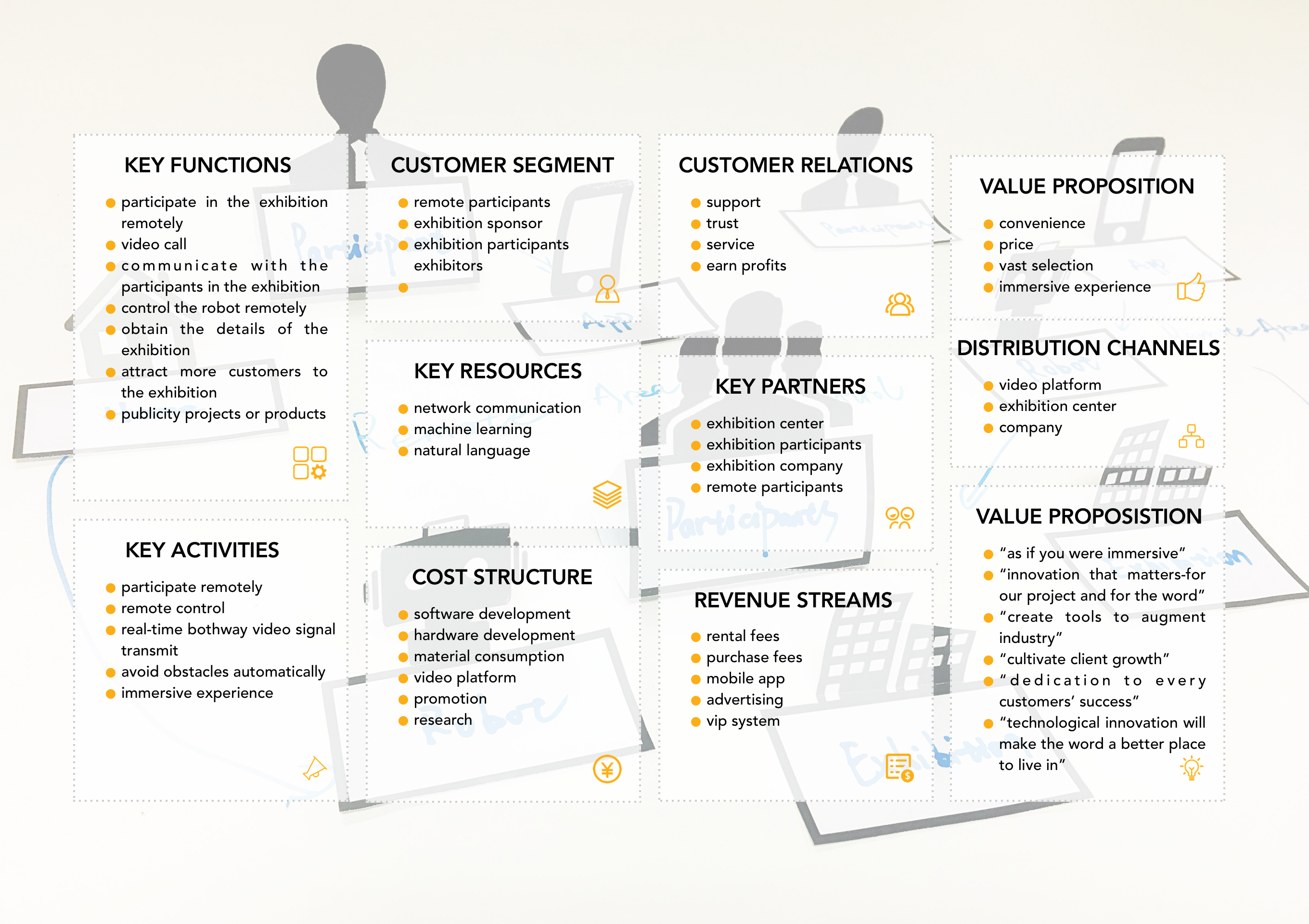
BUSINESS STRATEGIES
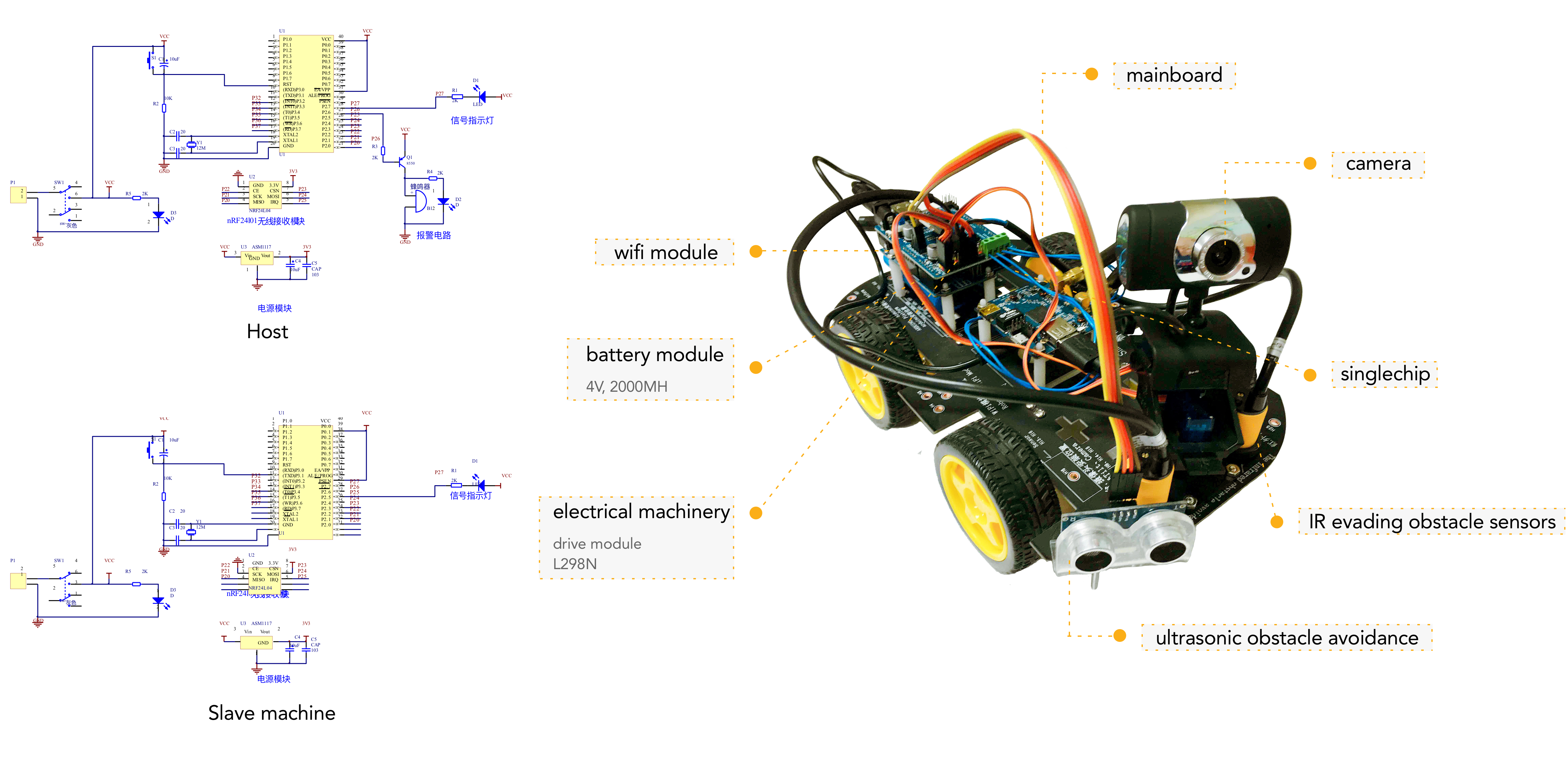
HARDWARE DEVELOPMENT
Based on ARDUNIO, we conduct hardware development and software development. I completed hardware development together with another boy in the major of Electronic Engineering.
SOFTWARE DEVELOPMENT (This part is done by other team members.)
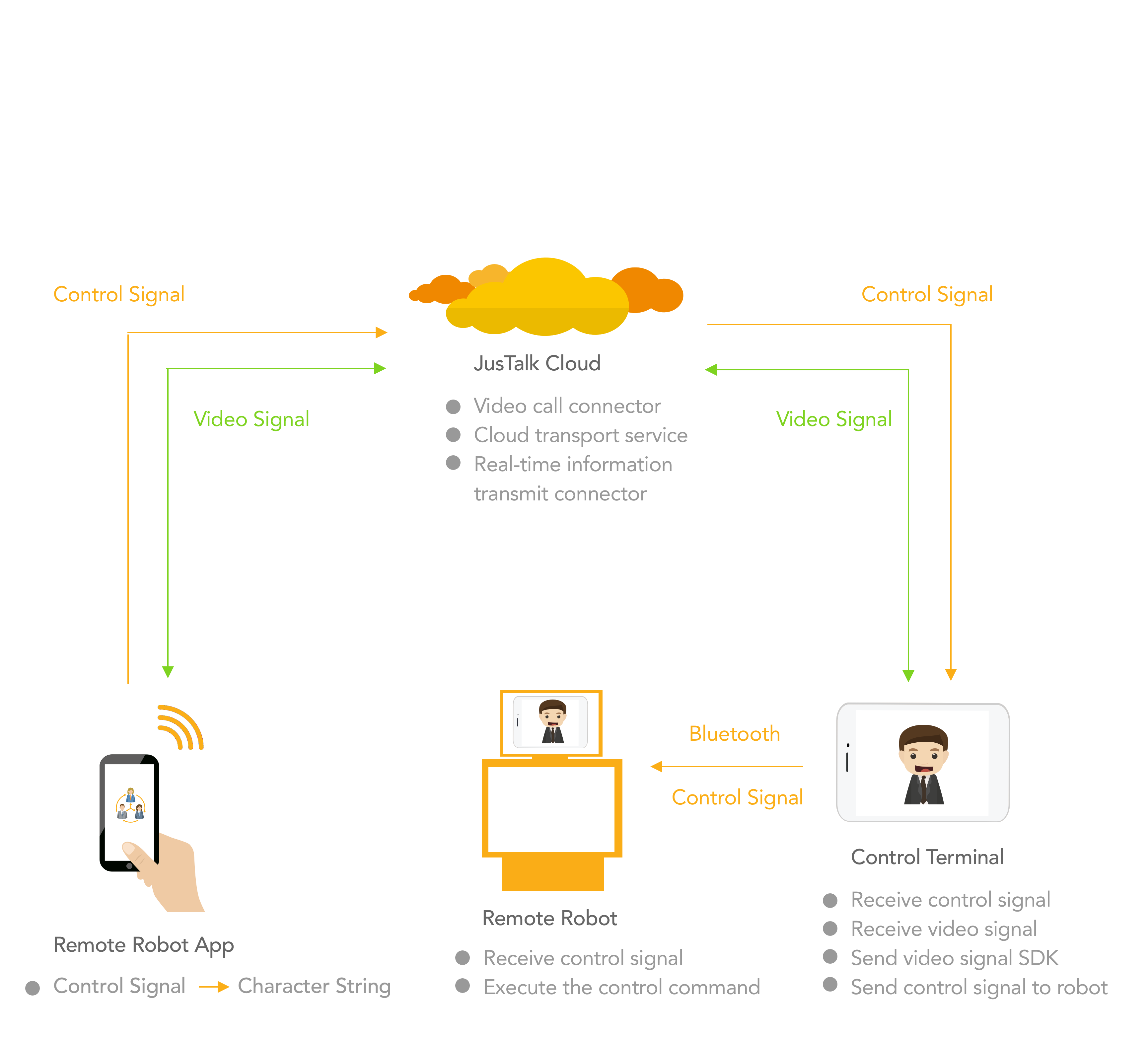
We use the network communication to complete the real-time bothway video signal and the control signal transmission of the robot. We choose JusTalk Cloud platform and its provision of cloud communication SDK as a technical support. Using the video call connector and cloud transport service provided by the SDK, we complete the real-time video interaction between the remote robot and the control terminal. At the same time the SDK provides the connector to transmit real-time information, we will control the terminal generated by the button, and the control signals formatted into a string of information transmitted to the robot side, and then the signal send through Bluetooth or USB to the robot control board. The control string would be converted into control commands for the robot, thus completing the remote control of the robot.
DESIGN WORKS
The following shows some of my design works, including appearance design for our robot and the UI design for our remote robot APP. For the appearance design, I plan to use ABS plastic to make the model just as shown in the 3D modeling. The model is about 1.8m high. Due to lack of funds, in the design stage, I made a simple handmade wood demo.
1. Appearance Design

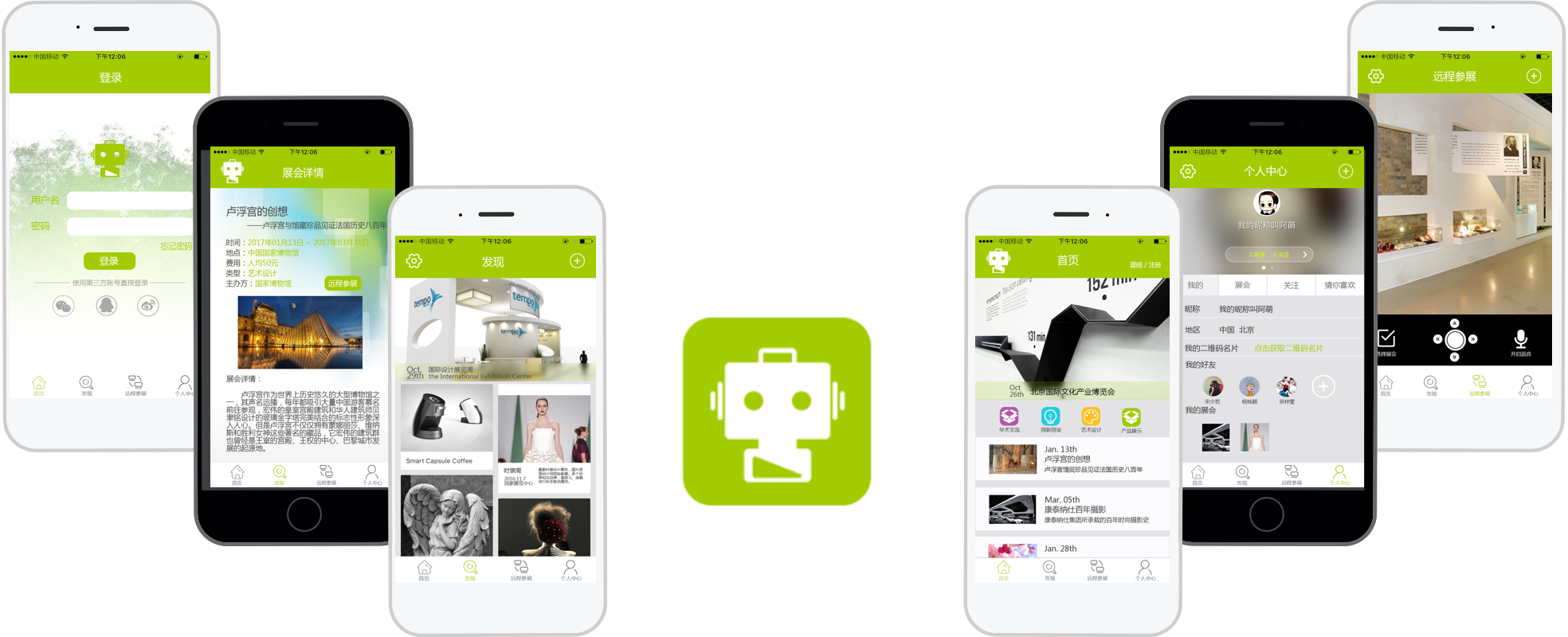
2. UI Design
3. Souvenir Design
I design some bookmarks as souvenir to our clients and I set a a subcription in WeChat to widespread our project and attract more clients.

SCENARIO
ABOUT US
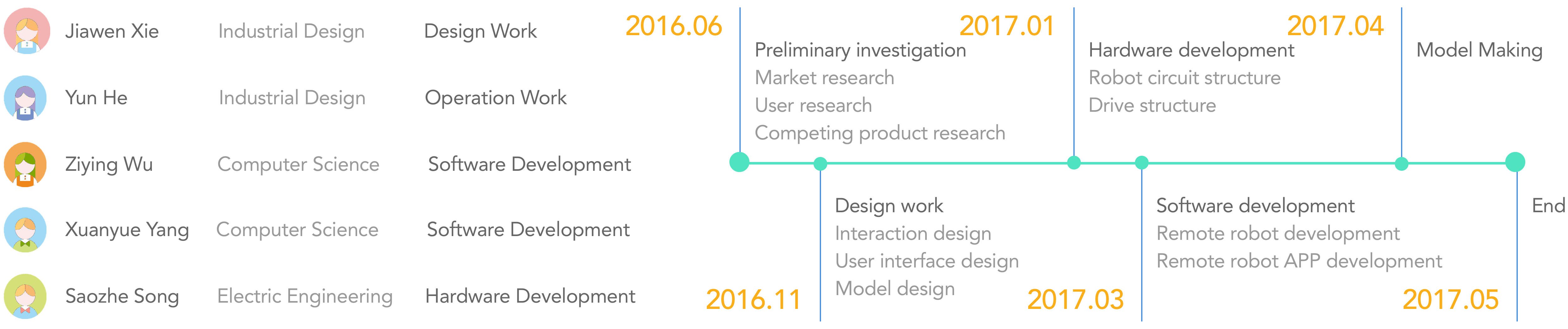
Our team consists of five team members who are responsible for different tasks in marketing, design, hardware development and software development. With our joint efforts, the entire project was successfully completed within a year, and received 15,000 yuan of revenue.
Team Members
Awards
The 9th College Students Innovation and Entrepreneurship Competition second prize
The 9th College Students Innovation and Entrepreneurship Competition No. 1 of the Top 10 Popular Projects
